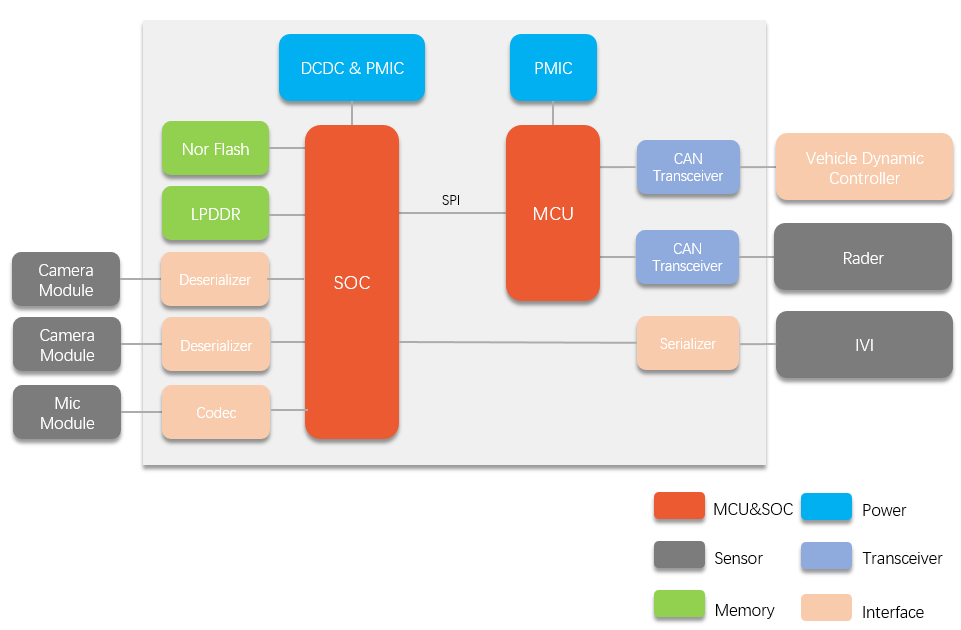
The solution can support multiple sensor access, to realize in-cabin vision and voice multi-mode fusion recognition . Besides, it also provides extra sensor interfaces for 4 cameras and 12 ultrasonic sensors outside the cabin, enabling visual + distance fusion parking . Through time-sharing multiplexing, the processing resources are fully utilized to meet both in-cabin interaction and automatic parking functionalities.
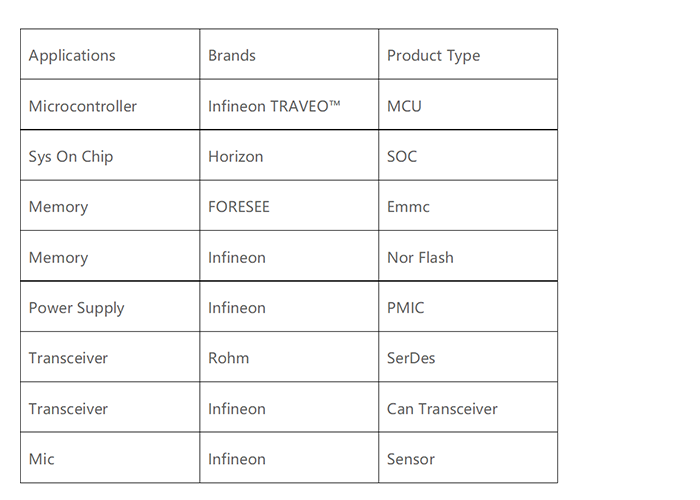
Major Models